itthon
>
Termékek > Lézeres távolságmérő modul > 1535 nm-es lézeres távolságmérő modul > 1535 nm-es 3 km-es miniatűr lézeres távolságmérő modul








1535 nm-es 3 km-es miniatűr lézeres távolságmérő modul
A STA-AM30X lézeres távolságmérő modul a repülési idő (TOF) technológiát használja a 10 métertől 4000 méterig terjedő precíz távolságméréshez. Támogatja az 1 Hz-től 10 Hz-ig terjedő frekvenciát, és UART (TTL 3.3V) kommunikációs interfésszel rendelkezik. A funkciók közé tartozik az egylövéses távolságmérés, a folyamatos távolságmérés, az első/utolsó célfelismerés és a többcélú hatótávolság, így alkalmas nagy pontosságú távolságmérési alkalmazásokhoz.
Kérdés küldése
termékleírás
MŰSZAKI ADATOK
| Projekt | Teljesítménymutatók | |
| Modell | STA-AM30X | |
| Teljesítménymutatók | Lézer hullámhossz | 1535±5nm |
| Szemvédelem | Ⅰ osztály (IEC 60825-1) | |
| Eltérési szög | ≤0,6 mrad | |
| Lézer energia | ≥100 μJ | |
| Látómező (FOV) | ~ 7. 4mrad | |
| Maximális mérési tartomány (láthatóság > 8 km) | ≥ 4000 m @ 60%-os tükröződés, épületcél | |
| ≥3000 m, 30%-os fényvisszaverő képesség, 2,3 × 2,3 méteres cél | ||
| ≥1500m @30%-os fényvisszaverő képesség, 0,5×1,7 m cél | ||
| ≥800 m @ 30%-os fényvisszaverő képesség, 0,2 × 0,3 m cél | ||
| Minimális hatótávolság | ≤10 m | |
| Tartózkodási frekvencia | 1 Hz ~ 10 Hz | |
| Többcélú felismerés | Akár 3 célpont | |
| Határozási pontosság | ±1 m | |
| Pontossági arány | ≥98% | |
| Vakriasztási gyakoriság | ≤1% | |
| Elektromos előírások | Interfész típusa | আপনার জীবনবৃত্তান্ত আপডেট করুন |
| Tápfeszültség | DC 3~5V | |
| Készenléti energiafogyasztás (teljes hőmérsékleti tartomány) | ≤10mW (a tápfeszültség alacsonyra húzva) | |
| ≤0,8 W (Tápfeszültség magasra húzva) | ||
| Működési energiafogyasztás (teljes hőmérsékleti tartomány) | 5V.≤0,9W@1Hz | |
| 5V, <1. 5W@10Hz | ||
| Csúcsteljesítmény fogyasztás | <3W@5V | |
| Indítási idő | ≤350ms (Indítás után válaszidő ≤20ms) | |
| Fizikai jellemzők | Súly | ≤ 141 g |
| Méretek | ≤ 27 × 25 × 15,5 mm (H × SZ × Ma) | |
| Sokk | 1200g, 1ms | |
| Rezgés | Állítsa be a folyamatos mérési frekvenciát | |
| Környezeti alkalmazkodóképesség | Üzemi hőmérséklet | -40 ~ +70 ℃ |
| Tárolási hőmérséklet | -45 ~ +70 ℃ | |
| Megbízhatóság | MTBF>1500h | |
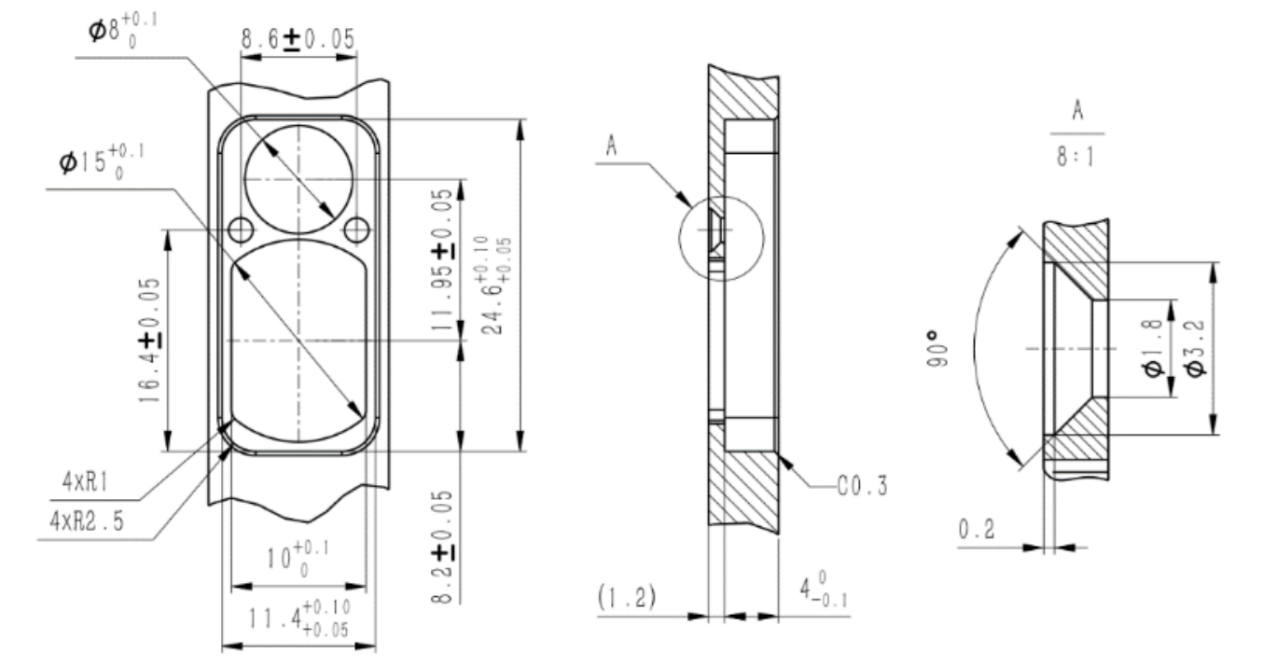
VÁZLATI MÉRETE (mm)

A tartókonzol ajánlott méretei a következők:
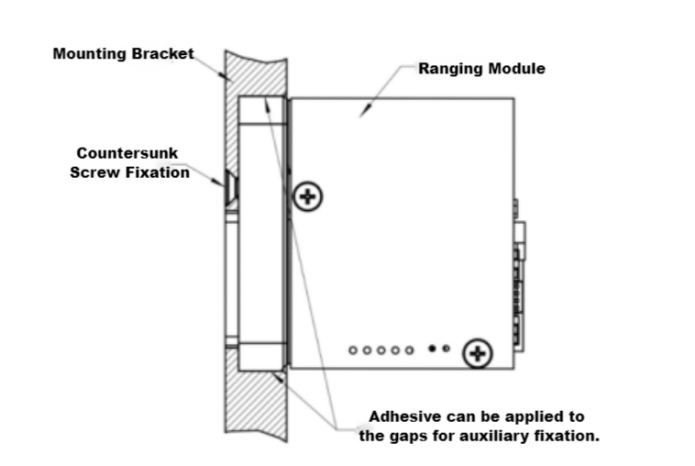
Telepítési rajz:
PIN interfész
Interfész típusa: UART (TTL 3.3V)
Csatlakozó típusa: FWF08002-S06B13W5M (Tesga csatlakozó)
| Pin | Meghatározás | Leírás | |
| 1 | POWER_ON | Modul tápkapcsoló, TTL 3,3 V szint; modul be (> 2,7 V), modul kikapcsolva (< 0,3 V) | |
| 2 | UART_RX | Soros port vevő, TTL 3.3V szint | |
| 3 | UART_TX | Soros portos adó, TTL 3,3 V szint | |
| 4 | NC | ||
| 5 | Erő pozitív | Tápegység, 3~5V | |
| 6 | GND | Soros port földelés |
Kábel definíció:
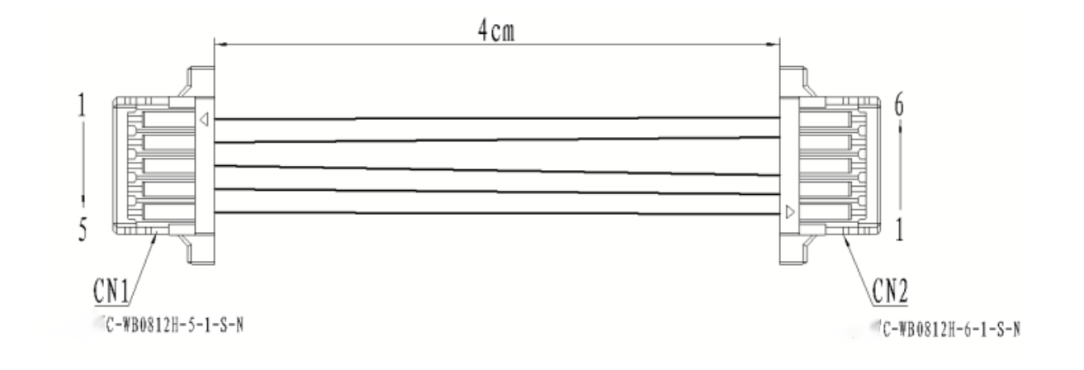
Hozzáillő kábelkivezetés:
| CN1 (C-WBO812H-5-1-S-N) | CN2 (C-WBO812H-6-1-S-N) | 5V, <1. 5W@10Hz | Szín |
| 1 | 6 | AWG32 | Fekete |
| 2 | 5 | AWG32 | Piros |
| 3 | 3 | AWG32 | Sárga |
| 4 | 2 | AWG32 | Zöld |
| 5 | 1 | AWG32 | Fehér |
Beágyazott szoftver
1 Protokoll leírás
1.1 Kommunikációs sebesség és formátum
| Szabványos formátum | Adatátviteli sebesség: 115200bps (gyári alapbeállítás) / 57600bps / 38400bps / 9600bpsByte adatformátum: 1 kezdőbit, 8 adatbit, 1 leállító bit, nincs ellenőrzés |
1.2 Alap csomagformátum
| szakasz leírása | 2.2.1 Küldés a lézeres távolságmérő modulhoz: | Hiba tünetei | Megjegyzések |
| Keret fejléc | 2 | 0xEE 0x16 | Fix érték |
| Adathossz | 1 | 2~7 | Az adathossz a három rész bájtok teljes száma: eszközkód, parancskód és parancsparaméterek |
| Berendezés kódja | 1 | 0x03 | Fix értékű, LRF S sorozatú mérési modul |
| Egyetlen tartomány | 1 | 0~255 | Az aktuális vezérlőparancs vezérlőobjektumát jelzi |
| Parancsparaméterek | 0~4 | 0~255 | Az aktuális vezérlőparancs vezérlőobjektuma-paramétereit jelzi |
| Ellenőrző összeg | 1 | 0~255 | Az ellenőrző összeg az összes bájt adat összege a berendezéskód három részében, a parancskódban és a parancsparaméterekben, az alsó 8 bittel |
1.3 vezérlőparancs (rendszer→távolságmérő modul)
| Parancskód | Magyarázd el | Parancsparaméter byte-ok |
| 0x01 | A berendezés önellenőrzése | 0 |
| 0x02 | Egyetlen tartomány | 0 |
| 0x03 | Állítsa be az első / utolsó / több célt | 1 |
| 0x04 | Folyamatos távolságtartás | 0 |
| 0x05 | Hagyd abba a távolságtartást | 0 |
| 0xA0 | Állítsa be a lézeres távolságmérő modul adatátviteli sebességét | 4 |
| 0xA1 | Állítsa be a folyamatos mérési frekvenciát | 2 |
| 0xA2 | Állítsa be a minimális kaputávolságot | 2 |
| 0xA3 | Minimális kapuzási távolság lekérdezése | 0 |
| 0xA4 | Maximális kaputávolság | 2 |
| 0xA5 | Kérdezze meg a maximális kapuzási távolságot | 0 |
| 0xA6 | 2.11.2 Laseretäisyysmoduulin palautus: | 0 |
| 0xA7 | Az MCU szoftver verziószámának lekérdezése | 0 |
| 0xA8 | Hardververziószám lekérdezése | 0 |
| 0xA9 | Sn szám lekérdezése | 0 |
| 0x90 | A teljes fénykibocsátás ideje | 0 |
| 0x91 | Ezúttal kérdezze meg a be- és kikapcsolás idejét | 0 |
1.4 Válaszadatok (távolságmérő modul→rendszer)
| Parancskód | Magyarázd el | Parancsparaméter byte-ok |
| 0x01 | A berendezés önellenőrzése | 4 |
| 0x02 | Egyetlen tartomány | 7 |
| 0x03 | Állítsa be az első / utolsó / több célt | 0 |
| 0x04 | Folyamatos távolságtartás | 4 |
| 0x05 | Hagyd abba a távolságtartást | 0 |
| 0x06 | Tartományrendellenesség (csak ha a hatótávolság-rendellenesség parancs állapota abnormális, a parancs visszaadja az egyszeres vagy folyamatos tartomány-meghatározás válaszparancsát) | 4 |
| 0xA0 | Állítsa be a lézeres távolságmérő modul adatátviteli sebességét | 4 |
| 0xA1 | Állítsa be a folyamatos mérési frekvenciát | 2 |
| 0xA2 | Állítsa be a minimális kaputávolságot | 2 |
| 0xA3 | Minimális kapuzási távolság lekérdezése | 2 |
| 0xA4 | Maximális kaputávolság | 2 |
| 0xA5 | Kérdezze meg a maximális kapuzási távolságot | 2 |
| 0xA6 | 2.11.2 Laseretäisyysmoduulin palautus: | 4 |
| 0xA7 | Az MCU szoftver verziószámának lekérdezése | 4 |
| 0xA8 | Hardververziószám lekérdezése | 4 |
| 0xA9 | Sn szám lekérdezése | 3 |
| 0x90 | A teljes fénykibocsátás ideje | 3 |
| 0x91 | Ezúttal kérdezze meg a be- és kikapcsolás idejét | 3 |
1.5 Működési folyamat
a távolságmérő modul bekapcsolása után alapértelmezés szerint készenléti módban van. Engedélyeznie kell a modul tápkapcsolóját (a power_on fel van húzva) körülbelül 0,5 másodpercig (a meghajtó kondenzátor befejezi a töltést), majd az alábbi 6.2-ben leírt összes parancsművelet végrehajtható.
2 Külön megállapodás
2.1 A berendezés önellenőrzése
2.1.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0x01 | 0x04 |
2.1.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Írd le | 0xEE | 0x16 | 0x06 | 0x03 | 0x01 | Állapot3 | Állapot2 | Állapot1 | Állapot0 | Check_sum |
| Status3: reservedStatus2: visszhang intenzitás 0x00~0xFFStatus1: bit0 -- FPGA rendszerállapot; 1 Normál 0 Kivételbit1 -- lézer fénykimeneti állapot; 1 fénykibocsátás 0 nincs fénybit2 -- főhullám észlelési állapota; 1 fő hullám 0 nincs fő hullámbit3 -- visszhangérzékelés állapota; 1 visszhang 0 nincs echobit4 -- előfeszített kapcsoló állapota; 1 bias on 0 bias offbit5 -- előfeszítés kimeneti állapot; 1 az előfeszítési feszültség normális 0 előfeszítés abnormalbit6 -- hőmérsékleti állapot; 1 a hőmérséklet normál 0 hőmérséklet abnormális bit7 -- fénykibocsátás kikapcsolt állapot; 1 érvényes 0 invalidStatus0: bit0 -- 5v6 tápállapot; 1 normál 0 kivétel | ||||||||||
2.2 Egyes tartomány
2.2.1 Küldés a lézeres távolságmérő modulhoz:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0x02 | 0x05 |
2.2.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Írd le | 0xEE | 0x16 | 0x06 | 0x03 | 0x02 | Állapot | Tartományérték egész szám magas 8 bit | Tartományérték egész szám alacsonyabb, 8 bit | Tartományérték tizedesjegyek | Check_sum |
| Az első/utolsó cél tartományának meghatározásakor: Állapot: 0x00 azt jelzi, hogy a mérési eredmény egyetlen cél; A 0x01 azt jelzi, hogy a távolsági eredményben van egy elülső cél; A 0x02 azt jelzi, hogy van egy hátsó cél a távolsági eredményben; 0x03 fenntartva; A 0x04 azt jelzi, hogy a tartomány eredménye kívül esik a tartományon; 0x05 fenntartva;Több célpontos mérés esetén:Status_ bit3~0: A 0x0 azt jelzi, hogy a mérési eredmény egyetlen cél; A 0x1 azt jelzi, hogy van egy elülső cél a távolsági eredményben; A 0x2 azt jelzi, hogy van egy hátsó cél a távolsági eredményben; A 0x3 azt jelzi, hogy a távolsági eredménynek első és hátsó célpontja van; A 0x4 azt jelzi, hogy a mérési eredmény a tartományon kívül esik; 0x5 fenntartva;Status_ bit7~4: 0x0 ~ 0xf jelzi az aktuális távolság eredmény számát; Értéktartomány [0, N-1], célpontok száma 1 ≤ N ≤ 16; Tartomány értéke = tartomány érték egész szám magas 8 bit × 256 + tartomány érték egész alacsony 8 bit + tartomány érték decimális bit × 0,1, egység m | ||||||||||
2.3 Első / utolsó / több cél beállítása
2.3.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| Írd le | 0xEE | 0x16 | 0x03 (adathossz) | 0x03 | 0x03 | Cél | Check_sum |
| Target:0x01 Állítsa be az első céltartományt; 0x02 beállítja a terminál céltartományát; 0x03 többcélú tartomány beállítása; | |||||||
2.3.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4 Folyamatos távolságmérés
2.4.1 Küldés a lézeres távolságmérő modulra:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Írd le | 0xEE | 0x16 | 0x06 | 0x03 | 0x04 | Állapot | Tartományérték egész szám magas 8 bit | Tartományérték egész szám alacsonyabb, 8 bit | Tartományérték tizedesjegyek | Check_sum |
| Az első és az utolsó célpont távolságának meghatározásakor: Állapot: 0x00 azt jelzi, hogy a távolsági eredmény egyetlen cél; A 0x01 azt jelzi, hogy a távolsági eredményben van egy elülső cél; A 0x02 azt jelzi, hogy van egy hátsó cél a távolsági eredményben; 0x03 fenntartva; A 0x04 azt jelzi, hogy a tartomány eredménye kívül esik a tartományon; 0x05 fenntartva;Több célpontos mérés esetén:Status_ bit3~0: A 0x0 azt jelzi, hogy a mérési eredmény egyetlen cél; A 0x1 azt jelzi, hogy van egy elülső cél a távolsági eredményben; A 0x2 azt jelzi, hogy van egy hátsó cél a távolsági eredményben; A 0x3 azt jelzi, hogy a távolsági eredménynek első és hátsó célpontja van; A 0x4 azt jelzi, hogy a mérési eredmény a tartományon kívül esik; 0x5 fenntartva;Status_ bit7~4: 0x0 ~ 0xf jelzi az aktuális távolság eredmény számát; Értéktartomány [0, N-1], célpontok száma 1 ≤ N ≤ 16; | ||||||||||
2.5 Hagyja abba a távolságtartást
2.5.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.5.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.6 Távolsági anomália
Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Írd le | 0xEE | 0x16 | 0x06 | 0x03 | 0x06 | tartalék | tartalék | tartalék | Állapot1 | Check_sum | |
| Status1: bit0 -- FPGA rendszerállapot; 1 normál 0 kivétel Bit1 -- lézer fénykimeneti állapot; 1 fénykibocsátás 0 nincs fény Bit2 -- főhullám észlelési állapota; 1 fő hullám 0 nincs fő hullám Bit3 -- visszhangérzékelés állapota; 1 visszhang 0 nincs visszhang Bit4 -- előfeszített kapcsoló állapota; 1 előfeszítés be 0 előfeszítés ki Bit5 -- előfeszítés kimeneti állapota; 1 Az előfeszítési feszültség normál 0 előfeszítés abnormális Bit6 -- hőmérsékleti állapot; 1 A hőmérséklet normál 0 abnormális hőmérséklet Bit7 -- fénykibocsátás kikapcsolt állapot; 1 érvényes 0 érvénytelenEz az utasítás csak akkor kerül visszaadásra, ha az 1. állapot 0~7 bitje abnormális. | |||||||||||
2.7 Állítsa be a lézeres távolságmérő modul adatátviteli sebességét
2.3.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Írd le | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | BaudHigh24 | BaudHigh16 | BaudLow8 | BaudLow0 | Check_sum |
2.7.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Írd le | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | BaudHigh24 | BaudHigh16 | BaudLow8 | BaudLow0 | Check_sum |
2.8 Állítsa be a folyamatos mérési frekvenciát
2.8.1 Küldés a lézeres távolságmérő modulra:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Írd le | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0x0A1 | Frek | Num | Check_sum |
| Frekv.: 0x01~0x0A Egyszeri/folyamatos hatótávolságú frekvenciaNum:0x00 tartalék | ||||||||
ویبرومتر
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0xA1 | 0xA4 |
2.9 Állítsa be a minimális kaputávolságot
2.9.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Írd le | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0xA2 | TÁL | DIS_L | Check_sum |
| DIS_H: Távolság magas 8 bit DIS_L: Távolság kisebb 8 bit DIS: 10 ~ 20000 Minimális kapuzási távolság tartomány, M-ben | ||||||||
2.9.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Írd le | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0xA2 | TÁL | DIS_L | Check_sum |
| DIS_H: Távolság magas 8 bit DIS_L: Távolság kisebb 8 bit DIS: 10 ~ 20000 Minimális kapuzási távolság tartomány, M-ben | ||||||||
2.10 Minimális kapuzási távolság lekérdezése
2.10.1 Küldés a lézeres távolságmérő modulra:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Írd le | 0xEE | 0x16 | 0x02 | 0x03 | 0xA3 | 0xA6 |
2.10.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Írd le | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0xA3 | TÁL | DIS_L | Check_sum |
| DIS_H: Távolság magas 8 bit DIS_L: Távolság kisebb 8 bit DIS: 10 ~ 20000 Minimális kapuzási távolság tartomány, M-ben | ||||||||
2.11 Állítsa be a maximális kapuzási távolságot
2.11.1 Küldés a lézeres távolságmérő modulhoz:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| leírni | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0xA4 | TÁL | DIS_L | Check_sum |
| DIS_H: Távolság magas 8 bit DIS_L: Távolság kisebb 8 bit DIS: 10 ~ 20000 Minimális kapuzási távolság tartomány, M-ben | ||||||||
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| leírni | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0xA4 | TÁL | DIS_L | Check_sum |
| DIS_H: Távolság magas 8 bit DIS_L: Távolság kisebb 8 bit DIS: 10 ~ 20000 Minimális kapuzási távolság tartomány, M-ben | ||||||||
2.12 Maximális kapuzási távolság lekérdezése
2.12.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0xA5 | 0xA8 |
2.12.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| leírni | 0xEE | 0x16 | 0x04 (adathossz) | 0x03 | 0xA5 | TÁL | DIS_L | Check_sum |
| DIS_H: Távolság magas 8 bit DIS_L: Távolság kisebb 8 bit DIS: 10 ~ 20000 Minimális kapuzási távolság tartomány, M-ben | ||||||||
2.13 Az FPGA szoftver verziószámának lekérdezése
2.13.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0xA6 | 0xA9 |
2.13.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| leírni | 0xEE | 0x16 | 0x06 | 0x03 | 0xA6 | Változat | Dátum | MonYear | Szerző | Check_sum |
| Verzió: bit7~bit4 Fő verziószám (1-15) bit3~bit0 Kisebb verziószám (0-15) pl.: 0x10——V1.0Data: Dátum (1~31)Hétév: bit7~bit4 hónap (1~12)bit3~0, adott év 3~bit) 2020-2035 Szerző: 0x6c cliu; 0x5d dwu 0xcc cycheng | ||||||||||
2.14 Az MCU szoftver verziószámának lekérdezése
2.14.1 Küldés a lézeres távolságmérő modulhoz:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0xA7 | 0xAA |
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| leírni | 0xEE | 0x16 | 0x06 | 0x03 | 0xA7 | Változat | Dátum | MonYear | Szerző | Check_sum |
| Verzió: bit7~bit4 Fő verziószám (1~15)bit3~bit0 Kisebb verziószám (0~15)pl.: 0x10——V1.0Data: Dátum(1~31)Hétév: bit7~bit4 hónap (1~12)bit3~bit0), adott év 3~bit0. 2020-2035 Szerző: 0x00 jyang 0xf1 llfu 0x01 zqxiong | ||||||||||
2.15 Hardververziószám lekérdezése
111-912-000-011 A1-B6-E5000-F2-G4800-H05
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0xA8 | 0xAB |
2.15.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| leírni | 0xEE | 0x16 | 0x06 | 0x03 | 0xA8 | MBVS | LDVS | APDVS | LDVS | Check_sum | |
| MBVS: Alaplap hardver verziószáma CTVS: Vezérlőlap hardver verziószámaApdvs: érzékelő kártya hardver verziószámaLDVS: Driver kártya hardver verziószáma Bit7 ~ bit4 fő verziószám (1 ~ 15) bit3 ~ bit0 kisebb verziószám (0 ~ 15) pl.:0x10——V1. 0 | |||||||||||
2.16 Sn szám lekérdezése
2.16.1 Küldés a lézeres távolságmérő modulhoz:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0xA9 | 0xAC |
2.16.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| leírni | 0xEE | 0x16 | 0x05 | 0x03 | 0xA9 | MonYear | Num_H | Num_L | Check_sum |
| Monyear: bit7 ~ bit4 hónap (1 ~ 12) Bit3 ~ bit0 év (0 ~ 15), ami 2020 ~ 2035Num_ H: A szám 8 számjegyű highNum_ 50: NoNum alsó 8 számjegye: 1 ~ 999 Nem | |||||||||
2.17 A teljes fénykibocsátás ideje
2.17.1 Küldés a lézeres távolságmérő modulra:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0x90 | 0x93 |
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| leírni | 0xEE | 0x16 | 0x05 | 0x03 | 0x90 | PNUM3 | PNUM2 | PNUM1 | Check_sum |
| PNUM3: teljes fénykibocsátási idő, bit23 ~ bit16PNUM2: teljes fénykibocsátási idő, bit15 ~ bit8PNUM1: teljes fénykibocsátási idő, bit7 ~ bit0 | |||||||||
2.18 Ezúttal kérdezze meg a be- és kikapcsolás idejét
2.18.1 Küldés a lézeres távolságmérő modulba:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| leírni | 0xEE | 0x16 | 0x02 | 0x03 | 0x91 | 0x94 |
2.18.2 Lézeres távolságmérő modul visszatérése:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| leírni | 0xEE | 0x16 | 0x05 | 0x03 | 0x91 | PNUM3 | PNUM2 | PNUM1 | Check_sum |
| PNUM3: teljes fénykibocsátási idő, bit23 ~ bit16PNUM2: teljes fénykibocsátási idő, bit15 ~ bit8PNUM1: teljes fénykibocsátási idő, bit7 ~ bit0 | |||||||||
3 Utasítási példa
| 3.1 A berendezés önellenőrzése KÜLDÉS: ee 16 02 03 01 04RECV: ee 16 06 03 01 ff 00 f7 ff f9 | 3.5 Első cél beállítása KÜLDÉS: ee 16 03 03 03 01 07RECV: ee 16 02 03 03 06 |
| 3.2 Egyedi tartomány KÜLDÉS: ee 16 02 03 02 05RECV: ee 16 06 03 02 04 00 00 00 09 | கோடெரே பற்றி - 2006 முதல் தோல் பொருட்கள் OEM/ODM நிபுணர் |
| 3.3 Folyamatos tartomány KÜLDÉS: ee 16 02 03 04 07RECV: ee 16 06 03 04 04 00 00 00 0bRECV: ee 16 06 03 04 04 00 00 00 …RECV: 0b | 3.7 Több cél beállítása KÜLDÉS: ee 16 03 03 03 03 09 RECV: ee 16 02 03 03 06 |
| 3.4 A hatótávolság leállítása KÜLDÉS: 16 02 03 05 08 RECV esetén: 16 02 03 05 08 | 3.8 Állítsa be a folyamatos mérési frekvenciát 1 Hz KÜLDÉS: ee 16 04 03 a1 01 00 a5RECV: ee 16 02 03 a1 a4 |
| 3.9 Állítsa be a folyamatos tartományfrekvenciát 5Hz KÜLDÉS: ee 16 04 03 a1 05 00 a9RECV: ee 16 02 03 a1 a4 |
Használati utasítás
1. Annak érdekében, hogy a kezelők biztonságosan és helyesen használhassák a STA-AM30X miniatűr lézeres távolságmérő termék különböző funkcióit, ez a kezelési és karbantartási kézikönyv utasításokat ad a használatára és karbantartására vonatkozóan. Ez a termék kezelőire és karbantartóira vonatkozik.
A STA-AM30X miniatűr lézeres távolságmérő (a továbbiakban: lézeres távolságmérő) egy precíziós optoelektronikai termék, amely lézert bocsát ki a mért cél felé, és a lézer repülési ideje alapján számítja ki a távolságinformációkat. Ez a lézeres távolságmérő az Uart (TTL_3.3V) kommunikációs interfészen keresztül kommunikál, kiemelkedő teljesítmény és egyszerű kezelés jellemzi. A távolságmérő lézerét tilos közvetlen emberi szemnek kitenni.
2. Javaslatok az optikai ablak kiválasztásához és bevonásához
2.1 Anyagjavaslatok
Az optikai ablak anyagaként a H-K9L optikai üveget ajánljuk. A H-K9L a legelterjedtebb színtelen optikai üveg, amely 300-2100 nm-es lézertartományban használható. Magas költség-teljesítmény aránnyal és kiváló fizikai tulajdonságokkal rendelkezik.
2.2 Feldolgozási javaslatok
Az optikai ablak ékszögtűrésének a lehető legkisebbnek kell lennie. Javasoljuk, hogy az ékszög tűrése ≤ 3' (tűrési fokozat ≤ 7. szint);
Az optikai ablak optikai felületének a lehető legsimábbnak kell lennie. Javasoljuk, hogy a profil számtani átlagos eltérése (Ra) 0,012 legyen.
2.3 Bevonatozási javaslatok
Ha a teljes rendszerintegráció ablaklencsét használ, akkor az 1535±20 nm-es hullámhossz sávban, ≤2 mm vastagságú lencse áteresztőképessége >98% ajánlott. A lencse és a modul végfelülete közötti távolságnak ≤3 mm-nek, az elfordulási szögnek ≤1,5°-nak és a dőlésszögnek ≤30°-nak kell lennie.
Az 1535 nm-es lézeres távolságmérő optikai ablakához javasolt egy 1525 nm és 1545 nm közötti tartományban, ≥ 99%-os áteresztőképességű tükröződésgátló fóliával bevonni.
A termék sajátos használati környezetétől függően további védőfóliák, például hidrofób fólia vagy kemény fólia választható az optikai ablak külső felületének bevonására. A többi indikátor tekintetében lásd a MIL-STD-810G-t, és az áteresztőképességnek ≥ 97%-nak kell lennie.
a) Ellenőrizze, hogy a termék megjelenése normális-e;
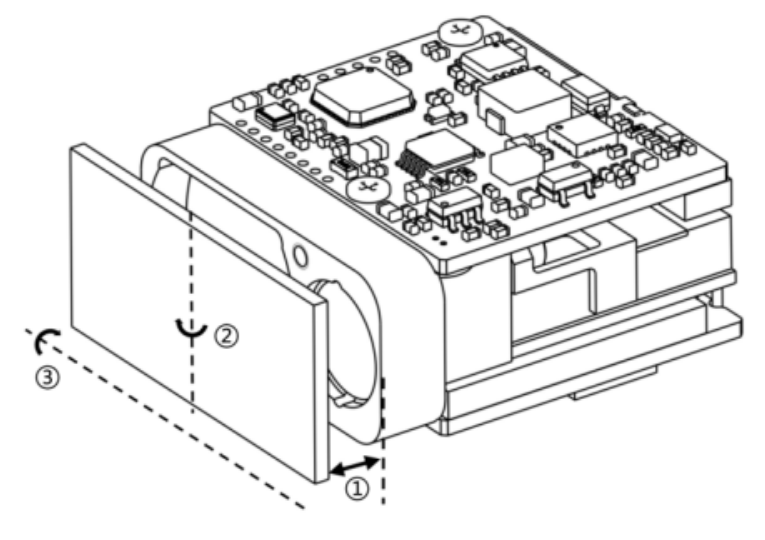
Az optikai ablak effektív rekesznyílása különböző termékektől függ. Külső méretének biztosítania kell, hogy az optikai ablak effektív apertúrája - az optikai ablak külső átmérője ≥ 2 mm, és a távolságmérő antenna külső átmérője - az optikai ablak effektív apertúrájának vetített mérete ≥ 1,5 mm. A sematikus diagram a következőképpen látható. Mivel az optikai ablak bizonyos mértékig elnyeli a lézert, ajánlatos magának az optikai ablaknak a vastagságát 2-4 mm-en belül szabályozni a külső mérettől függően.
Mivel az optikai ablaknak nagy az áteresztőképessége, ajánlatos a sugárzó optikai tengely és az optikai ablak normálértéke közötti tengelyirányú eltérést 0° és 2° között szabályozni. Az optikai ablak és a két lencsecső helyzetének sematikus diagramja az alábbiak szerint látható. Ugyanakkor az optikai ablak és a távolságmérő közötti légrésnek a lehető legkisebbnek kell lennie. A 4. ábra az optikai ablak elhelyezésének vázlatos diagramjait mutatja kétféleképpen.
Az optikai ablak effektív apertúrája y2 - az optikai ablak külső átmérője y1>2mm
A távolságmérő antenna külső átmérője3 - az optikai ablak effektív apertúrájának vetítési mérete y2,>1,5 mm

Az optikai ablak és a távolságmérő közötti d légrés a lehető legkisebb legyen. Az optikai ablak effektív apertúrája x2 - az optikai ablak külső átmérője x1>2mm
A távolságmérő antenna külső átmérője x3-az optikai ablak effektív apertúrájának vetítési mérete x2,>1,5 mm
Az optikai ablak és a távolságmérő közötti d légrésnek a lehető legkisebbnek kell lennie
Az optikai ablak külső méreteinek és elhelyezésének kétféle vázlatos diagramja
3. Üzemeltetés Annak érdekében, hogy teljes mértékben megértse a rendszer összes funkcióját, és megfelelően elsajátítsa a telepítési, üzemeltetési és karbantartási módszereket, kérjük, figyelmesen olvassa el ennek a fejezetnek a tartalmát a rendszer telepítése és használata előtt.
3.1 Bekapcsolási művelet
3.1.1 Bekapcsolás előtt
Csatlakoztassa a lézeres távolságmérőt, a hibakereső kábelt, az egyenáramú tápegységet és a gazdaszámítógépet az ábrán látható módon.

A csatlakozás sematikus diagramja
3.1.2 Bekapcsolás
Bekapcsolás: Csatlakoztassa a tápegységet.
3.2 Kikapcsolási művelet
3.2.1 Kikapcsolás előtt
Kikapcsolás előtt meg kell győződni arról, hogy az egyes termékek munkafolyamatai és feladatai befejezett állapotban vannak, és a program ki van lépve.
3.2.2 Kikapcsolás
Kikapcsolás lépései: Húzza ki a tápfeszültséget.
3.3 Működés
3.3.1 Hatótávolság-mód
2.11.1 Küldés a lézeres távolságmérő modulhoz:
a) Küldje el a "Single Ranging" parancsot a lézeres távolságmérőnek. A lézeres távolságmérő egyszeri mérést végez, és jelenti a távolsági állapotot és a távolságértéket.
b) Küldje el az "1Hz Ranging" parancsot a lézeres távolságmérőnek. A lézeres távolságmérő másodpercenként egyszer méri a távolságot, és jelenti a távolsági állapotot és a távolságértéket.
c) A távolság mérés leállításához küldje el a "Hangolás leállítása" parancsot.
d) Küldje el az "5Hz Ranging" parancsot a lézeres távolságmérőnek. A lézeres távolságmérő másodpercenként ötször méri a távolságot, és jelenti a távolsági állapotot és a távolságértéket.
e) A távolság mérés leállításához küldje el a "Hangolás leállítása" parancsot.
f) Küldje el a "10Hz Ranging" parancsot a lézeres távolságmérőnek. A lézeres távolságmérő másodpercenként tízszer végez távolságmérőt, és jelenti a távolsági állapotot és a távolságértéket.
g) A távolság mérés leállításához küldje el a "Hangolás leállítása" parancsot.
3.3.2 Távolságkapuzás beállítása
A távolsági kapuzás a kapuzási távolság egy részének beállítását jelenti (hexadecimális formában) a hatótávolság-tartományon belül. A kapuzási értéknél kisebb céltávolság információ nem kerül visszaküldésre, és a mérési tartományon belüli kapuzási értéknél magasabb távolsági érték az effektív távolsági érték.
Ha beállításra van szükség, a működési mód a következő:
a) Küldje el a "Gating Value Setting" parancsot a lézeres távolságmérőnek.
Küldje el a "Ranging" parancsot a lézeres távolságmérőnek. A lézeres távolságmérő elvégzi a távolságmeghatározást, megállapítja, hogy a visszaküldött távolság értéke nagyobb-e, mint a távolság kapuzási érték, majd jelenti a távolsághatározás eredményét.
c) A távolságmeghatározás leállításához küldje el a "Hangolás leállítása" parancsot. Ha a távolsági kapuzás funkcióra nincs szükség, akkor a kezdeti beállításokat kézzel kell visszaállítani (állítsa a kapuzás értékét 0-ra).
3.3.3 Önellenőrzési mód
Az önellenőrzés működési módja:
a) Küldje el az „Önellenőrzési kérdés” utasítást a lézeres távolságmérőnek. A lézeres távolságmérő megkezdi az önellenőrzést, és visszaküldi az olyan információkat, mint az aktuális környezeti hőmérséklet és a működési állapot.
4. Ellenőrzés és karbantartás
4.1 Általános ellenőrzés
A szemrevételezést és a bekapcsolási ellenőrzést a termék első használatakor és az erőforrásmodul cseréje után kell elvégezni. A normál használatú termékek esetében használat előtt csak a bekapcsolási ellenőrzés szükséges.
4.1.1 Szemrevételezéses ellenőrzés
A vizuális ellenőrzés lépései a következők:
a) Ellenőrizze, hogy a termék megjelenése normális-e;
b) Ellenőrizze, hogy nincs-e hiba a kábelcsatlakozásban, és a csatlakozásnak szilárdnak kell lennie.
4.1.2 Bekapcsolási ellenőrzés
A bekapcsolási ellenőrzés lépései a következők:
a) Hajtsa végre a bekapcsolási műveletet a 3.1 lépések szerint;
b) Indítsa el az önteszt modult;
c) Az ellenőrzés befejezése után fejezze be a kikapcsolási műveletet a 3.2 lépések szerint.
4.2 Rendszeres karbantartás
A lézeres távolságmérő normál munkakörülmények között nem igényel karbantartást. Karbantartás szükséges, ha egy évnél hosszabb ideig pormentes környezetben tárolják. A karbantartás tartalma a következőket tartalmazza:
4.2.1 Általános ellenőrzés
Végezze el a termék általános ellenőrzését, ha az nincs feszültség alatt. A lépések a következők:
a) Minden jelölésnek és számnak a terméken és a tesztkábel csatlakozóján (aljzatán) helyesnek és egyértelműnek kell lennie;
b) A panelen lévő mindenféle csavart meg kell húzni;
c) Gondoskodni kell arról, hogy a termék optikai üvegén ne legyenek olyan rögzítések, mint például világos foltok, pattanások, vízfoltok, penészgombák, ujjlenyomatok, porrészecskék stb., valamint repedések, amelyek vizuálisan akadályozzák a normál megfigyelést.
4.2.2 Bekapcsolási ellenőrzés
Végezze el a lézeres távolságmérő átfogó ellenőrzését és karbantartását, amikor az be van kapcsolva. A tartalom a következőket tartalmazza:
a) Kapcsolja be egymás után a terméket;
b) Végezze el a bekapcsolási műveletet a 3.1 lépések szerint;
c) Indítsa el a termék önteszt modulját, és fejezze be a termék öntesztjét;
d) Fejezze be a kikapcsolási műveletet a 3.2 lépések szerint.
5. A hibatünetek és a hibaelhárítási módszerek elemzése
A lézeres távolságmérő precíziós termék. Hiba esetén a teljes eszközt vissza kell küldeni a gyárba hibaelemzés, helymeghatározás és javítás céljából. Az önjavítás nem megengedett.
A gyakori hibatünetek és hibaelhárítási módszerek a következő táblázatban láthatók.
Gyakori hibatünetek és hibaelhárítási módszerek
| Hiba tünetei | Lehetséges okok | Ellenőrzési módszer | Intézkedések a hibaelhárításhoz |
| A terméket nem lehet normálisan bekapcsolni. | a) Tápellátási és csatlakozókábelek hibái.b) Áramköri hibák. | 2.14.1 Lähetä laseretäisyysmoduuliin: | a) Cserélje ki a tápegységet vagy a csatlakozókábelt.b) b) Áramköri hiba esetén forduljon a gyártóhoz segítségért a probléma megoldásában. |
| Nem küldhető vissza kommunikációs információ. | a) A csatlakozókábel hibája b) Rendellenes tápellátás c) c) Kommunikációs hiba a lézeres távolságmérőben | a) Ellenőrizze, hogy a csatlakozókábel normális-e.b) Ellenőrizze, hogy az áramellátás megfelelő-e. | a) Cserélje ki a csatlakozókábelt és a tápegységet. b) Kommunikációs problémák esetén forduljon a gyártóhoz segítségért. |
6. A csomagolásra, szállításra és tárolásra vonatkozó követelmények
6.1 Csomagolás
A felbontott és utántöltésre szoruló termékeket az eredeti csomagolásnak megfelelően kell csomagolni. Amikor a termékeket vissza kell küldeni a gyárba, lehetőleg az eredeti csomagolást kell használni. Ha más csomagolási formákat használnak, az nem okozhatja a termék teljesítményének csökkenését vagy a termékek károsodását.
6.2 Szállítás
Az újracsomagolt termékek szállíthatók autóval, vonattal, repülőgéppel, hajóval stb. Szállítás közben a csomagolt tételeket rögzíteni kell a szállítóeszközre, hogy elkerüljék az olyan jelenségeket, mint az ütés, a durva kezelés, az eső és a hó. A közúti és vasúti szállítási környezetekkel kapcsolatban lásd a MIL-STD-810G dokumentumot.
6.3 Tárolás
Az újracsomagolt termékek szabadban, vadon nem tárolhatók. 0 ℃ és +30 ℃ közötti tárolási hőmérsékletű, 80 %-ot meg nem haladó relatív páratartalommal, korrozív anyagok eróziójától, erős mechanikai rezgésektől és ütésektől, valamint erős mágneses mezőktől mentes raktárban kell tárolni.
Biztonsági óvintézkedések
A termék biztonságos használata érdekében kérjük, figyelmesen olvassa el ezt a használati útmutatót a termék használata előtt.
Az újracsomagolt termékek szabadban, vadon nem tárolhatók. 0 ℃ és +30 ℃ közötti tárolási hőmérsékletű, 80 %-ot meg nem haladó relatív páratartalommal, korrozív anyagok eróziójától, erős mechanikai rezgésektől és ütésektől, valamint erős mágneses mezőktől mentes raktárban kell tárolni.
l Ügyeljen az elektrosztatikus védelemre: A lézeres távolságmérő elektronikus alkatrészei érzékenyek az elektrosztatikus kisülésre. Védelmi intézkedések nélkül ne érintsen meg semmilyen elektronikus eszközt.
l Csak akkor kapcsolja be a lézeres távolságmérőt, ha a megadott feszültség- és teljesítménytartományon belül működik.
l Tilos az optikai lencséket ujjal vagy kemény tárggyal megérinteni (az olajos szennyeződés vagy a lencsék karcolódásának elkerülése érdekében).
l Tilos nagy fényvisszaverő képességű céltárgyakat túl közelről mérni (az érzékelő központi elemeinek sérülésének elkerülése érdekében stb.).
l Tilos a lézeres távolságmérőt nem meghatározott körülmények között (például erősen szennyezett környezetben, a tárolási hőmérsékleti tartomány túllépése stb.) tárolni.
l Tilos a lézeres távolságmérőt erős mechanikai hatásoknak kitenni (rezgés, ütés, leejtés stb.).

OEM/ODM 1-90km LRF modul
Shenzhen Jiguang Technology Co., Ltd
E-mail: sales@jioptics.com
Weboldal:www.jioptics.com
Cím: 2017 Longcheng Avenue, Longgang District, Shenzhen
Hot Tags: 1535 nm-es 3 km-es miniatűr lézeres mérési modul, gyártók, beszállítók, gyár, Kína, Kínában készült, testreszabott, kiváló minőségű
Kapcsolódó kategória
905 nm-es lézeres távolságmérő modul
1535 nm-es lézeres távolságmérő modul
1570 nm-es lézeres távolságmérő modul
1.54um lézer távolsági modul
1064nm lézer célmegjelenítő
Drón elleni ststem modul
Ranging Lidar modul
Kérdés küldése
Kérdését az alábbi űrlapon adja meg. 24 órán belül válaszolunk.