itthon
>
Termékek > Lézeres távolságmérő modul > 1535 nm-es lézeres távolságmérő modul > 5 km-es szembiztos lézeres távolságmérő modul (LRF)




")




5 km-es szembiztos lézeres távolságmérő modul (LRF)
A STA-B50MX egy emberi szem számára biztonságos lézeres távolságmérő modul, amely képes érzékelni a céltávolságot, és soros kommunikáción keresztül továbbítani a mért távolságot a felső számítógépnek. Láthatóság ≥ 12km, cél fényvisszaverő képesség ≥ 0,3, páratartalom ≤ 80%, a jármű (2,3m × 2,3m NATO-célpont) hatótávolsága ≥5km.
Kérdés küldése
termékleírás
Fő funkciók
(1) Egyszeri és folyamatos mérési tartomány;
(2) Válaszol a lézeres távolságmeghatározási parancsokra, és bármikor leállíthatja a távolságmeghatározást a stop parancsnak megfelelően;
(3) Távolságmérés során impulzusonként egyszer adja ki a távolságadatokat és állapotinformációkat;
(4) Jelenteni tudja a továbbított lézerimpulzusok összesített számát (nincs áramkimaradás);
(5) Távolság kiválasztása, első és hátsó cél kijelzése;
(6) Önteszt funkció.
(2) Válaszol a lézeres távolságmeghatározási parancsokra, és bármikor leállíthatja a távolságmeghatározást a stop parancsnak megfelelően;
(3) Távolságmérés során impulzusonként egyszer adja ki a távolságadatokat és állapotinformációkat;
(4) Jelenteni tudja a továbbított lézerimpulzusok összesített számát (nincs áramkimaradás);
(5) Távolság kiválasztása, első és hátsó cél kijelzése;
(6) Önteszt funkció.
Termék teljesítményindex
| Tétel | Műszaki paraméter | Oktatás |
| Modell | STA-B50MX | |
| Működési hullámhossz | 1535±5nm | |
| A szem biztonsága | 1. osztály (IEC 60825-1) | |
| Fogadási rekesz | Φ25 mm | |
| Emissziós apertúra | Φ10 mm | |
| Határozási képesség | 30-8000 m | |
| Hatótávolság | ≥10000 m | MAX hatótávolság, fényvisszaverő képesség: 0,9, megfigyelői látótávolság 25 km |
| ≥7000 m | Nagy épületcélok, Reflexiósság: 0,6, megfigyelői látótávolság 20 km | |
| ≥5000 m | NATO célpont | |
| ≥3000 m | Élő cél | |
| ≥1500 m | UAV célpont | |
| Mini Range | 30 m |
|
| Több célpont észlelése | Akár 3 célpont |
|
| Távolság szerinti felbontó képesség | 30 m |
|
| Határozási pontosság | ±1m |
|
| Tartós frekvencia | 1-10Hz állítható |
|
| Pontossági arány | ≥98% |
|
| Vakriasztási gyakoriság | 1% |
|
| Eltérési szög | ≤0,5 mrad |
|
| Kommunikációs interfész | RS422 | A TTL/RS232 interfész testreszabható |
| Feszültség | DC9~32V |
|
| Energiafogyasztás | ≤ 1,2 W (@ 1 Hz) | Munkaerő |
| ≤5W@12V | Csúcsteljesítmény | |
| 0,1 W | Készenléti tápellátás (csatlakoztassa a POWER-ON) | |
| Lézer optikai tengely stabilitás | ≤0,05 mrad |
|
| Párhuzamos hiba | ≤0,3 mrad | Az optikai tengely és a szerelési referencia párhuzamossági hibája |
| Mechanikai sokk | 75g, 1ms |
|
| Üzemi hőmérséklet | -40℃~+70℃ |
|
| Tárolási hőmérséklet | -55℃~+75℃ |
|
| Megbízhatóság | MTBF ≥ 1500h |
|
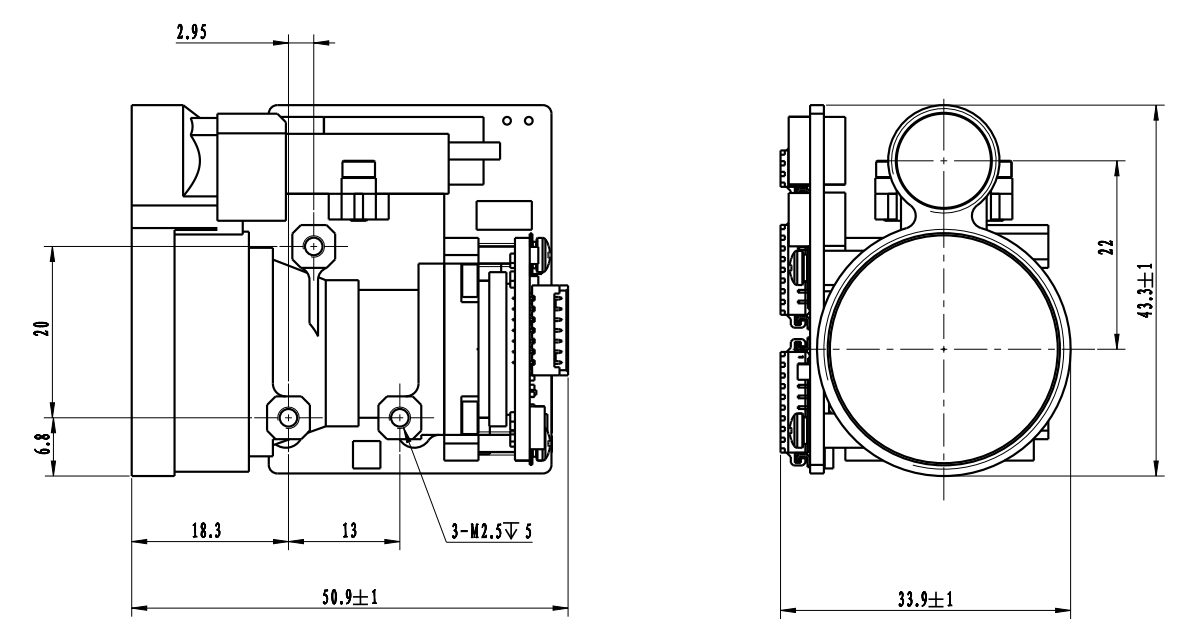
| Méret | ≤50x32x43,5mm |
|
| Súly | ≤75g |
|
| Fő funkció | Első és utolsó céltávolság, Több célpont mérés, Távolságszelektivitás | |
Megjegyzések:
1) NATO-célméret: 2,3 m × 2,3 m; Az emberi cél mérete 0,5 m × 1,7 m; UAV célméret 0,2 m × 0,3 m; Tükröződési képesség 30%, páratartalom≤80%, megfigyelői láthatóság ≥ 12km
Szerkezet telepítési felület
Külső interfész
| Pin | Meghatározás | Funkció | Megjegyzések |
| 1 | RX+ | RS422 vevő + | Kék |
| 2 | RX- | RS422 vevő - | Zöld |
| 3 | TX- | RS422 átvitel - | Lila |
| 4 | TX+ | RS422 átvitel + | Sárga |
| 5 | GND | Kommunikációs földelő vezeték | Fehér |
| 6 | VEE | Tápegység + | Piros |
| 7 | GND | Tápegység - | Fekete |
| 8 | PWR EN | / | Hamu |
Külső interfész
OEM/ODM modulok és egyedi megoldások
A B50MX olyan rendszerintegrátorok számára készült, akik kényelmes, nagy teljesítményű és kompakt lézeres mérési megoldást keresnek. Megbízható teljesítményt nyújt az alkalmazások széles körében.
Nagyon kicsi, ultrakönnyű, alacsony fogyasztású és nagy távolságon is mérhető. Alkalmas kézi eszközökhöz (hőképalkotás), fegyverrögzítő alkalmazásokhoz, hordozható rendszerekhez és könnyű érzékelőkészletekhez, valamint pilóta nélküli légi járművekhez vagy UGV-khoz.
A B50MX olyan rendszerintegrátorok számára készült, akik kényelmes, nagy teljesítményű és kompakt lézeres mérési megoldást keresnek. Megbízható teljesítményt nyújt az alkalmazások széles körében.
Nagyon kicsi, ultrakönnyű, alacsony fogyasztású és nagy távolságon is mérhető. Alkalmas kézi eszközökhöz (hőképalkotás), fegyverrögzítő alkalmazásokhoz, hordozható rendszerekhez és könnyű érzékelőkészletekhez, valamint pilóta nélküli légi járművekhez vagy UGV-khoz.
Kommunikációs protokoll
1. Átviteli protokoll: aszinkron soros kommunikáció;
2. Portdíj: 115200;
3. Adatbitek: 10 bit: egy kezdőbit, 8 adatbit, egy stopbit, érvénytelen ellenőrzés;
4. Adatstruktúra: Az adatok a fejléc bájtból, parancsrészből, adathosszból, paraméterrészből és ellenőrző bájtból állnak;
5. Kommunikációs mód: a fővezérlő vezérlőparancsokat küld a távolságmérő gépnek, a távolságmérő gép pedig fogadja és végrehajtja az utasításokat. A távolságmérő állapotban a távolságmérő gép a mérési ciklusnak megfelelően visszaküldi a mérési ciklus adatait és állapotát a felső számítógépnek. A kommunikációs formátum és a parancstartalom a következő táblázatban látható.
A) Fővezérlő küld
Az elküldendő üzenet formátuma a következő:
2. Portdíj: 115200;
3. Adatbitek: 10 bit: egy kezdőbit, 8 adatbit, egy stopbit, érvénytelen ellenőrzés;
4. Adatstruktúra: Az adatok a fejléc bájtból, parancsrészből, adathosszból, paraméterrészből és ellenőrző bájtból állnak;
5. Kommunikációs mód: a fővezérlő vezérlőparancsokat küld a távolságmérő gépnek, a távolságmérő gép pedig fogadja és végrehajtja az utasításokat. A távolságmérő állapotban a távolságmérő gép a mérési ciklusnak megfelelően visszaküldi a mérési ciklus adatait és állapotát a felső számítógépnek. A kommunikációs formátum és a parancstartalom a következő táblázatban látható.
A) Fővezérlő küld
Az elküldendő üzenet formátuma a következő:
| STX0 | CMD | LEN | ADATOK1H | ADATOK1L | CHK |
2. táblázat Az elküldött üzenet formátumának leírása
| rendelési szám | név | megmagyarázni | kód | megjegyzéseket |
| 1 | STX0 | Üzenet kezdő jelzője | A5(H) |
|
| 2 | CMD | CW | Lásd a 3. táblázatot |
|
| 3 | LEN | DL | Az összes bájt száma, kivéve a kezdőjelet, a parancsszót és az ellenőrző összeget |
|
| 4 | ADATOK | paraméter | Lásd a 3. táblázatot |
|
| 5 | ADATOK |
|
||
| 6 | CHK | XOR ellenőrzés | Az érvényes bájt kivételével az összes többi bájt XOR-re van állítva |
|
A parancs leírása a következő:
3. táblázat A mester által a távolságmérő gépnek küldött parancsok és adatszavak leírása
3. táblázat A mester által a távolságmérő gépnek küldött parancsok és adatszavak leírása
| rendelési szám | CW | funkció | adatbájt | megjegyzéseket | hossz | Példa kód |
| 1 | 0x00 | megszűnik | DATAH=00 (H) ADATOK = 00 (H) | A távolságmérő leállítja a mérést | Hat bájt | A5 00 02 00 00 A7 |
| 2 | 0x01 | Egyetlen tartomány | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 01 02 00 00 A6 |
| 3 | 0x02 | Folyamatos távolságtartás | ADATOK=XX(H)ADATOK=YY(H)) | A DATA a tartomány időtartamát írja le ms-ban | Hat bájt | A5 02 02 03 E8 4E (1 Hz-es tartomány) |
| 4 | 0x03 | önellenőrzés | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 03 02 00 00 A4 |
| 5 | 0x04 | Állítsa be a kijelöléshez legközelebbi távolságot | ADATOK=XX(H)ADATOK=YY(H)) | A DATA a vakzóna értékét írja le, mértékegysége 1m | Hat bájt | A5 04 02 00 64 C7 (100 m a legközelebbi távolság) |
| 6 | 0x06 | A fényteljesítmény-lekérdezések összesített száma | DATAH=00 (H) ADATOK = 00 (H) | A fényteljesítmény-lekérdezések összesített száma | Hat bájt | A5 06 02 00 00 A1 |
| 7 | 0x11 | Az APD tápellátása be van kapcsolva | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 11 02 00 00 B6 |
| 8 | 0x12 | Az APD tápellátása ki van kapcsolva | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 12 02 00 00 B5 |
| 9 | 0xEB | Szám lekérdezés | DATAH=00 (H) ADATOK = 00 (H) | Szám lekérdezés | Hat bájt | A5 EB 02 00 00 4C |
a) A fő vezérlő formátumot kap
A kapott üzenet formátuma a következő:
A kapott üzenet formátuma a következő:
| STX0 | CMD | LEN | DATAn | ADATOK0 | CHK |
4. táblázat A fogadott üzenetek formátumának leírása
| rendelési szám | név | megmagyarázni | kód | megjegyzéseket |
| 1 | STX0 | Üzenetindítási jelző 1 | A5 (H) |
|
| 2 | CMD_JG | Adat parancsszó | Lásd az 5. táblázatot |
|
| 3 | LEN | DL | Az összes bájt száma, kivéve a kezdőjelet, a parancsszót és az ellenőrző összeget |
|
| 4 | Dn | paraméter | Lásd az 5. táblázatot |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR ellenőrzés | Az érvényes bájt kivételével az összes többi bájt XOR-re van állítva |
|
Fővezérlő fogadási állapotleírás:
Az 5. táblázat a távolságmérő által a fővezérlőnek küldött adatszót írja le
Az 5. táblázat a távolságmérő által a fővezérlőnek küldött adatszót írja le
| rendelési szám | CW | funkció | adatbájt | megjegyzéseket | teljes hossza |
| 1 | 0x00 | megszűnik | D1=00 (H) D0=00 (H) |
|
Hat bájt |
| 2 | 0x03 | önellenőrzés | D8 ~ D1 | D8-D7: -5V feszültség, mértékegysége 0,01V.D6-D5: vakfolt érték, mértékegysége 1mD4: APD nagyfeszültség értéke, V egység | 12 bájt |
| 3 | 0x04 | Távolság a legközelebbi hozzáférési beállítástól, mértékegysége m | D1 D0 | A DATA a legközelebbi távolság értékét írja le, mértékegysége 1m; Kezdés magas és vége alacsony | Hat bájt |
| 4 | 0x06 | A fényteljesítmény-lekérdezések összesített száma | D3-D0 | A DATA a fények számát fejezi ki, 4 bájtot, a magas bájttal először | Hét bájt |
| 5 | 0x11 | Az APD tápellátása be van kapcsolva | D1=00 (H) D0=00 (H) | Az APD tápellátása be van kapcsolva | Hat bájt |
| 6 | 0x12 | Az APD kikapcsolás | D1=00 (H) D0=00 (H) | Az APD tápellátása ki van kapcsolva | Hat bájt |
| 7 | 0xED | Túlórázás | 0x00 0x00 | A lézer lézeres működési védelem alatt áll és nem mérhető. | Hat bájt |
| 8 | 0xEE | Hatékonysági hibák | 0x00 0x00 |
|
Hat bájt |
| 9 | 0XEF | Soros port kommunikációs időtúllépés | 0x00 0x00 |
|
Hat bájt |
| 10 | 0x01 | Egyetlen hatótávolságú mérés (egy célpont, nulla a második és harmadik célpontnál, nulla a harmadik célpontnál a cél elején és végén) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 első céltávolság (egység 0,1m)D5-D3 távolság a második céltól (egység: 0,1m)D2-D0 harmadik céltávolság (egység 0,1m)3. A célok a közeltől a farD9 (bit7-bit0) jelzőbájtig vannak: D9 a 7. pozíció, amely a fő hullámot jelzi; 1: van főhullám, 0: nincs főhullám.D9 a visszhangot jelző 6. pozíció; 1: van visszhang, 0: nincs visszhangD9 Az ötödik pozíció a lézer állapotát jelzi; 1: normál lézer, 0: lézerhibaD9 az időtúllépés jelzőjének negyedik bitje, 1: normál, 0: timeoutD9 érvénytelen a 3. pozícióban (1-re állítva);D9 A második pozíció az APD állapotát jelzi; 1: normál, 0: errorD9 az első pozíció, amely jelzi, hogy van-e korábbi cél; 1: van egy korábbi cél, 0: nincs előző cél (cél a vak területen).D9 A 0. bit jelzi, hogy van-e következő cél; 1: van egy következő cél, 0: nincs további cél (a fő cél utáni cél a következő cél) | 14 bájt |
| 11 | 0x02 | Folyamatos távolság (egyetlen célpont, nulla a második és harmadik célpontnál, nulla a harmadik célpontnál a cél elején és végén) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 első céltávolság (egység 0,1m)D5-D3 távolság a második céltól (egység: 0,1m)D2-D0 harmadik céltávolság (egység 0,1m)3. A célok a közeltől a farD9 (bit7-bit0) jelzőbájtig vannak: D9 a 7. bit, amely a fő hullámot jelzi; 1: van főhullám, 0: nincs főhullám.D9 a visszhangot jelző 6. pozíció; 1: van visszhang, 0: nincs visszhangD9 Az ötödik pozíció a lézer állapotát jelzi; 1: normál lézer, 0: lézerhibaD9 az időtúllépés jelzőjének negyedik bitje, 1: normál, 0: timeoutD9 érvénytelen a 3. pozícióban (1-re állítva);D9 A második pozíció az APD állapotát jelzi; 1: normál, 0: errorD9 az első pozíció, amely jelzi, hogy van-e korábbi cél; 1: van egy korábbi cél, 0: nincs előző cél (cél a vak területen).D9 A 0. bit jelzi, hogy van-e következő cél; 1: van egy következő cél, 0: nincs további cél (a fő cél utáni cél a következő cél) | 14 bájt |
| 12 | 0xEB | Szám lekérdezés | D17…… D0 | D17 D16 D15 D14 D13 D12 A teljes gép típuskódjaD11D10 TermékszámD9 D6 szoftververzióD5 D4 APD-számD3 D2 Lézerszám Az FPGA D1-es verziója | 22 bájt |
| Megjegyzés: ① Nem definiált adatbájt/bit, az alapértelmezett érték 0; | |||||
Hot Tags: 5 km-es szembiztos lézeres távolságmérő modul (LRF), gyártók, beszállítók, gyár, Kína, Kínában készült, testreszabott, kiváló minőségű
Kapcsolódó kategória
905 nm-es lézeres távolságmérő modul
1535 nm-es lézeres távolságmérő modul
1570 nm-es lézeres távolságmérő modul
1.54um lézer távolsági modul
1064nm lézer célmegjelenítő
Drón elleni ststem modul
Ranging Lidar modul
Kérdés küldése
Kérdését az alábbi űrlapon adja meg. 24 órán belül válaszolunk.