itthon
>
Termékek > Lézeres távolságmérő modul > Drón elleni ststem modul > 2 mrad 2 km-es lézeres távolságmérő modul drone elleni szárhoz








2 mrad 2 km-es lézeres távolságmérő modul drone elleni szárhoz
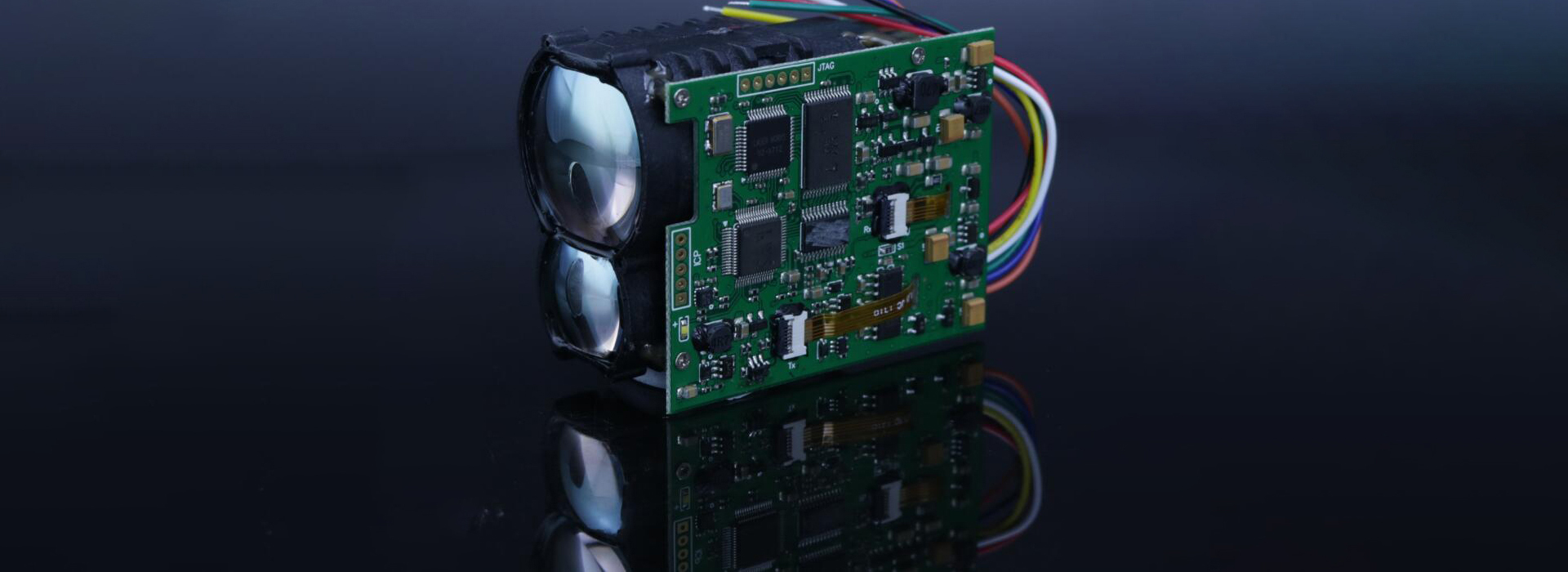
A kompakt STA-WR2000X lézeres távolságmérő modul kiválóan alkalmas a hadsereg és a haditengerészet légvédelmi rendszerébe való integrálásra. A távolságmérő modul a legfejlettebb dióda pumpás erbium üveglézert alkalmazza, amely magas rendelkezésre állású és alacsony karbantartási költséggel rendelkezik. 2 mrad eltérési szöge 0,1 ㎡ keresztmetszetű UAV-kat képes mérni akár 2000 méterig, így a drónellenes rendszerek fontos összetevője.
Kérdés küldése
termékleírás
1) Egyszeri és folyamatos mérés;
2) A lézeres távolságmeghatározási parancsokra való reagálás és a távolságmegállítás bármikori leállítása a stop parancsnak megfelelően;
3) A távolságadatokat és az állapotinformációkat impulzusonként egyszer adja ki a távolság mérése során;
4) Jelenteni tudja a továbbított lézerimpulzusok összesített számát (nincs áramkimaradás);
5) Távolság kiválasztása a cél megjelölése előtt és után;
6) Önteszt funkció.
2) A lézeres távolságmeghatározási parancsokra való reagálás és a távolságmegállítás bármikori leállítása a stop parancsnak megfelelően;
3) A távolságadatokat és az állapotinformációkat impulzusonként egyszer adja ki a távolság mérése során;
4) Jelenteni tudja a továbbított lézerimpulzusok összesített számát (nincs áramkimaradás);
5) Távolság kiválasztása a cél megjelölése előtt és után;
6) Önteszt funkció.
| Optikai index | |
| Hullámhossz | 1535nm±5nm |
| Lézeres divergencia szöge | ≤2 mrad |
| Hatékony vételi rekesz | 56 mm |
| Tartomány frekvencia | Egyes, 1 ~ 10 Hz állítható |
| Hatótávolság | Láthatóság ≥ 12 km, cél fényvisszaverő képesség ≥ 0,3, páratartalom ≤ 80%, UAV hatótávolság (0,25 m × 0,25 m) ≥ 2 km |
| Határozási pontosság | ≤±1m (RMS) |
| Pontossági mérés | ≥98% |
| Vakriasztási gyakoriság | ≤1% |
| Minimális mérési tartomány | ≤50 m |
| Lézer tengely stabilitás | ≤0,05 mrad |
| Az optikai tengely párhuzamos a telepítési referenciaponttal | ≤0,3 mrad |
| Mechanikai mutatók | |
| Méret | ≤90×63×82mm |
| Súly | ≤300g |
| Elektromos mutatók | |
| Áramellátás | DC9V~32V |
| Teljesítmény disszipáció | 3W@10Hz-nél kevesebb munkavégzés, 5W-nál kisebb csúcsfogyasztás |
| Felület | RS422 interfész, 115200bps |
| Kapcsolja be a vezérlőfelületet | Amikor elérte a biztonságos távolságot, kapcsolja be és használja; vagy alacsony fogyasztású üzemmódban a működési állapotának szabályozásához |
| Az áramköri lap védelme | Miután az áramköri lap tervezése és hibakeresése befejeződött, be kell vonni az ütésálló festéket és el kell végezni a "három védelmi" kezelést. |
| Környezeti alkalmasság | |
| Üzemi hőmérséklet | -40 ℃-65 ℃ |
| Tárolási hőmérséklet | -55 ℃-70 ℃ |
| Rezeg | GJB150.16 A-2009 "Hadifelszerelési Laboratóriumi Környezeti Vizsgálati Módszerek – Vibrációs teszt" |
| Lash | GJB150.18 A-2009 "Katonai felszerelések laboratóriumi környezeti vizsgálati módszere-hatásteszt" |
Jegyzet:
1. Tartománytartomány leírása: a tartomány megváltozik különböző vizsgálati körülmények és tesztcélok esetén, ha speciális célokat észlel, kérjük, lépjen kapcsolatba az értékesítési oldallal a megerősítéshez;
2.Minimális tartomány: 30m-100m ingadozás, normál használat után 50m-ig ajánlott; Mivel a lézer energia nagy, a közeli használat megégetheti az érzékelő chipet, ezért a hibakeresés során vigyen magával egy jó tükörfedelet, hogy megakadályozza a detektor chip leégését.
1. Tartománytartomány leírása: a tartomány megváltozik különböző vizsgálati körülmények és tesztcélok esetén, ha speciális célokat észlel, kérjük, lépjen kapcsolatba az értékesítési oldallal a megerősítéshez;
2.Minimális tartomány: 30m-100m ingadozás, normál használat után 50m-ig ajánlott; Mivel a lézer energia nagy, a közeli használat megégetheti az érzékelő chipet, ezért a hibakeresés során vigyen magával egy jó tükörfedelet, hogy megakadályozza a detektor chip leégését.
Mechanikai szerkezeti diagram

Külső interfész
| Pin | Meghatározás | Funkció | Megjegyzések |
| 1 | RX+ | RS422 vevő + | Kék |
| 2 | RX- | RS422 vevő - | Zöld |
| 3 | TX- | RS422 átvitel - | Lila |
| 4 | TX+ | RS422 átvitel + | Sárga |
| 5 | GND | Kommunikációs földelő vezeték | Fehér |
| 6 | VEE | UART TTL | Piros |
| 7 | GND | Tápegység - | Fekete |
| 8 | PWR EN | / | Hamu |
OEM/ODM 1-15 km-es lézeres hatótávolság-mérő modul ellenőrző pilóta nélküli légirendszerekhez (C-UAS)
Kommunikációs protokoll
1. Átviteli protokoll: aszinkron soros kommunikáció;
2. Portdíj: 115200;
Työskentele alle 3W@10Hz, huippuvirrankulutus alle 5W
4. Adatstruktúra: Az adatok a fejléc bájtból, parancsrészből, adathosszból, paraméterrészből és ellenőrző bájtból állnak;
5. Kommunikációs mód: a fővezérlő vezérlőparancsokat küld a távolságmérő gépnek, a távolságmérő gép pedig fogadja és végrehajtja az utasításokat. A távolságmérő állapotban a távolságmérő gép a mérési ciklusnak megfelelően visszaküldi a mérési ciklus adatait és állapotát a felső számítógépnek. A kommunikációs formátum és a parancstartalom a következő táblázatban látható.
A) Fővezérlő küld
2. Portdíj: 115200;
Työskentele alle 3W@10Hz, huippuvirrankulutus alle 5W
4. Adatstruktúra: Az adatok a fejléc bájtból, parancsrészből, adathosszból, paraméterrészből és ellenőrző bájtból állnak;
5. Kommunikációs mód: a fővezérlő vezérlőparancsokat küld a távolságmérő gépnek, a távolságmérő gép pedig fogadja és végrehajtja az utasításokat. A távolságmérő állapotban a távolságmérő gép a mérési ciklusnak megfelelően visszaküldi a mérési ciklus adatait és állapotát a felső számítógépnek. A kommunikációs formátum és a parancstartalom a következő táblázatban látható.
A) Fővezérlő küld
Az elküldendő üzenet formátuma a következő:
| STX0 | CMD | LEN | ADATOK1H | PWR EN | CHK |
2. táblázat Az elküldött üzenet formátumának leírása
| 2. Portdíj: 115200; | név | megmagyarázni | kód | megjegyzéseket |
| 1 | STX0 | Üzenet kezdő jelzője | A5(H) |
|
| 2 | CMD | CW | Lásd a 3. táblázatot |
|
| 3 | LEN | DL | Az összes bájt száma, kivéve a kezdőjelet, a parancsszót és az ellenőrző összeget |
|
| 4 | ADATOK | paraméter | Lásd a 3. táblázatot |
|
| 5 | érkezés |
|
||
| 6 | CHK | XOR ellenőrzés | Az érvényes bájt kivételével az összes többi bájt XOR-re van állítva |
|
A parancs leírása a következő:
3. táblázat A mester által a távolságmérő gépnek küldött parancsok és adatszavak leírása
3. táblázat A mester által a távolságmérő gépnek küldött parancsok és adatszavak leírása
| 2. Portdíj: 115200; | CW | funkció | adatbájt | megjegyzéseket | ADATOK1L | Példa kód |
| 1 | 0x00 | megszűnik | DATAH=00 (H) ADATOK = 00 (H) | A távolságmérő leállítja a mérést | Hat bájt | RS422 vastaanotin + |
| 2 | 0x01 | Egyetlen tartomány | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 01 02 00 00 A6 |
| 3 | 0x02 | Folyamatos távolságtartás | ADATOK=XX(H)ADATOK=YY(H)) | A DATA a tartomány időtartamát írja le ms-ban | Hat bájt | A5 02 02 03 E8 4E (1 Hz-es tartomány) |
| 4 | 0x03 | önellenőrzés | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 03 02 00 00 A4 |
| 5 | 0x04 | Állítsa be a kijelöléshez legközelebbi távolságot | ADATOK=XX(H)ADATOK=YY(H)) | A DATA a vakzóna értékét írja le, mértékegysége 1m | Hat bájt | A5 04 02 00 64 C7 (100 m a legközelebbi távolság) |
| 6 | 0x06 | A fényteljesítmény-lekérdezések összesített száma | DATAH=00 (H) ADATOK = 00 (H) | A fényteljesítmény-lekérdezések összesített száma | Hat bájt | A5 06 02 00 00 A1 |
| 7 | 0x11 | Az APD tápellátása be van kapcsolva | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 11 02 00 00 B6 |
| 8 | 0x12 | Az APD tápellátása ki van kapcsolva | DATAH=00 (H) ADATOK = 00 (H) |
|
Hat bájt | A5 12 02 00 00 B5 |
| 9 | 0xEB | Szám lekérdezés | DATAH=00 (H) ADATOK = 00 (H) | Szám lekérdezés | Hat bájt | Adat parancsszó |
a) A fő vezérlő formátumot kap
A kapott üzenet formátuma a következő:
A kapott üzenet formátuma a következő:
| STX0 | CMD | LEN | ADAT | DÁTUM0 | CHK |
4. táblázat A fogadott üzenetek formátumának leírása
| 2. Portdíj: 115200; | név | megmagyarázni | kód | megjegyzéseket |
| 1 | STX0 | Üzenetindítási jelző 1 | A5(H) |
|
| 2 | CMD_JG | Adat parancsszó | Lásd az 5. táblázatot |
|
| 3 | LEN | DL | Az összes bájt száma, kivéve a kezdőjelet, a parancsszót és az ellenőrző összeget |
|
| 4 | Dn | paraméter | Lásd az 5. táblázatot |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR ellenőrzés | Az érvényes bájt kivételével az összes többi bájt XOR-re van állítva |
|
Fővezérlő fogadási állapotleírás:
Az 5. táblázat a távolságmérő által a fővezérlőnek küldött adatszót írja le
Az 5. táblázat a távolságmérő által a fővezérlőnek küldött adatszót írja le
| 2. Portdíj: 115200; | CW | funkció | adatbájt | megjegyzéseket | Teljes hossz |
| 1 | 0x00 | megszűnik | D1=00 (H) D0=00 (H) |
|
Hat bájt |
| 2 | 0x03 | önellenőrzés | D8-D1 | D8-D7: -5V feszültség, mértékegysége 0,01V.D6-D5: vakfolt érték, mértékegysége 1mD4: APD nagyfeszültség értéke, V egység | 12 bájt |
| 3 | 0x04 | Távolság a legközelebbi hozzáférési beállítástól, mértékegysége m | D1 D0 | A DATA a legközelebbi távolság értékét írja le, mértékegysége 1m; Kezdés magas és vége alacsony | Hat bájt |
| 4 | 0x06 | A fényteljesítmény-lekérdezések összesített száma | D3-D0 | A DATA a fények számát, 4 bájtot fejezi ki, a magas bájttal először | Hét bájt |
| 5 | 0x11 | Az APD tápellátása be van kapcsolva | D1=00 (H) D0=00 (H) | Az APD tápellátása be van kapcsolva | Hat bájt |
| 6 | 0x12 | Az APD kikapcsolás | D1=00 (H) D0=00 (H) | Az APD tápellátása ki van kapcsolva | Hat bájt |
| 7 | 0xED | Túlórázás | 0x00 0x00 | A lézer lézeres működési védelem alatt áll és nem mérhető. | Hat bájt |
| 8 | 0xEE | Hatékonysági hibák | 0x00 0x00 |
|
Hat bájt |
| 9 | 0XEF | Soros port kommunikációs időtúllépés | 0x00 0x00 |
|
Hat bájt |
| 10 | 0x01 | Egyetlen hatótávolságú mérés (egy célpont, nulla a második és harmadik célpontnál, nulla a harmadik célpontnál a cél elején és végén) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | Yhden etäisyyden mittaus (yksi tavoite, nolla toiselle ja kolmannelle kohteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | 14 bájt |
| 11 | 0x02 | Folyamatos távolság (egyetlen célpont, nulla a második és harmadik célpontnál, nulla a harmadik célpontnál a cél elején és végén) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 első céltávolság (egység 0,1m)D5-D3 távolság a második céltól (egység: 0,1m)D2-D0 harmadik céltávolság (egység 0,1m)3. A célok a közeltől a farD9 (bit7-bit0) jelzőbájtig vannak: D9 a 7. bit, amely a fő hullámot jelzi; 1: van főhullám, 0: nincs főhullám.D9 a visszhangot jelző 6. pozíció; 1: van visszhang, 0: nincs visszhangD9 Az ötödik pozíció a lézer állapotát jelzi; 1: normál lézer, 0: lézerhibaD9 az időtúllépés jelzőjének negyedik bitje, 1: normál, 0: timeoutD9 érvénytelen a 3. pozícióban (1-re állítva);D9 A második pozíció az APD állapotát jelzi; 1: normál, 0: errorD9 az első pozíció, amely jelzi, hogy van-e korábbi cél; 1: van egy korábbi cél, 0: nincs előző cél (cél a vak területen).D9 A 0. bit jelzi, hogy van-e következő cél; 1: van egy következő cél, 0: nincs további cél (a fő cél utáni cél a következő cél) | 14 bájt |
| 12 | 0xEB | Szám lekérdezés | D17…… D0 | D17 D16 D15 D14 D13 D12 A teljes gép típuskódjaD11D10 TermékszámD9 D6 szoftververzióD5 D4 APD-számD3 D2 Lézerszám Az FPGA D1-es verziója | 22 bájt |
| Megjegyzés: ① Nem definiált adatbájt/bit, az alapértelmezett érték 0; | |||||
Hot Tags: 2 mrad 2 km-es lézeres távolságmérő modul drone elleni szárhoz, gyártók, beszállítók, gyár, Kína, Kínában készült, testreszabott, kiváló minőségű
Kapcsolódó kategória
905 nm-es lézeres távolságmérő modul
1535 nm-es lézeres távolságmérő modul
1570 nm-es lézeres távolságmérő modul
1.54um lézer távolsági modul
1064nm lézer célmegjelenítő
Drón elleni ststem modul
Ranging Lidar modul
Kérdés küldése
Kérdését az alábbi űrlapon adja meg. 24 órán belül válaszolunk.